Archive
ความเข้าใจพื้นฐานสำหรับการตั้งค่าวิทยุบังคับ RC ( Radio Control )
วิทยุบังคับทุกวันนี้มีคุณสมบัติสูง มีการพัฒนาสัญญาณให้มีการรบกวนกันน้อยมาก ให้ความรู้สึกตอบสนองต่อการใช้งานดีมากและมีค่าให้ปรับแต่งมากมาย ครับ brands หรือ ยี่ห้อมี่นิยมใช้กันก็อย่างเช่น Futaba , Hitec, Sanwa และ Spektrum
ที่จะกล่าวต่อไปเป็นหัวข้อหลักๆ ที่ต้องทำความเข้าใจ ก่อนที่จะปรับค่าเหล่านั้น รวมถึงลำดับขั้นตอนของ หัวข้อเหล่านั้นว่าควรจะเกิดขึ้นตอนไหนอย่างไร ซึ่งในเรื่องนี้นั้น เป็นเรื่องที่ผู้ที่เริ่มเล่นใหม่ ๆ มักกระหายอยากรู้แต่ก็ยากที่จะหาผู้รู้อธิบายได้ อย่างแจ่มแจ้งถึงจุดประสงค์ของหัวข้อ Function การทำงานเหล่านั้น
ในบทความนี้ไม่ได้เฉพาะเจาะจงไปที่ อุปกรณ์ยี่ห้อได้โดยเฉพาะ หรือประเภทของการเล่น ชนิดใดโดยเฉพาะ นะครับ เราพูดเป็น concept โดยรวม แล้วหาก มีโอกาส หรือมีคำถามเฉพาะเรื่อง ก็จะหาข้อมูลเจาะเฉพาะเรื่องเอามาแบ่งปันกันให้ทราบนะครับก่อนอื่น
มาพูดถึง กฎเหล็กกันก่อนนะครับ
กฎเหล็กของการเล่น RC ก็คือ
- ต้องตรวจสอบก่อนนะครับว่า มีใครที่ใช้ความถี่เดียวกะเราหรือไม่ ไม่ว่าเราจะเล่นที่สนาม หรือเล่นที่ใดๆ ก็ตาม การกวนสัญญาณที่เกิดจากการใช้ความถี่เดียวกันทำให้เราไม่สามารถควบคุม เครื่องบิน หรือ รถเราได้ อาจทำให้ ตก หรือพุ่งเข้าหาคนทำให้เกิดบาดเจ็บได้ โดยเฉาะ เฮริคอปเตอร์ ซึ่งอันตรายมาก
- เปิดวิทยุก่อนเสมอแล้วค่อยเปิดไฟให้กับเครื่องบินหรือ รถ ต้องดูว่า throttle อยู่ในตำแหน่งต่ำสุดเสมอด้วย
- การปิด ก็ต้องเปิดที่รถ หรือเครื่องบินก่อน แล้วค่อยปิดที่วิทยุ นะครับ
ติดตั้ง Servo ให้ถูกต้อง
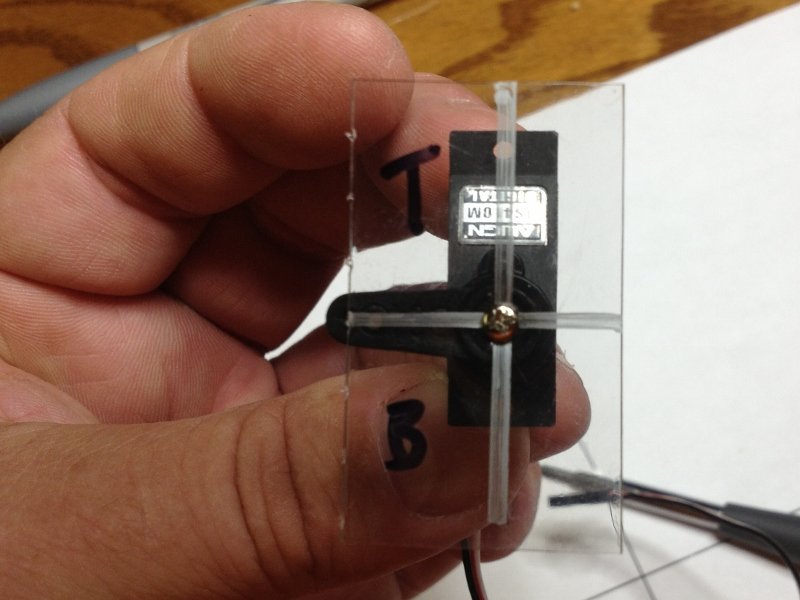
สิ่งแรกที่เราควรตรวจสอบในการ เซตเครื่องใหม่ หรือครั้งแรกก็คือต้องมั่นใจว่าเราติดตั้ง servo ได้เหมาะสมแล้ว หรืออยู่ในตำแหน่งที่เราได้ตรวจสอบแล้วว่าถูกต้อง คืออยู่ center ของมัน แขน ตั้งฉากกับ case ของ servo
ตรวจสอบได้ด้วยการ เปิดวิทยุ และ receiver โดยเสียบสาย Servo ไว้ (ยังไม่ต้องติดตั้ง Servo บน model ที่เราเล่นนะครับ ) และให้ตรวจสอบให้แน่ใจว่า trim ถูกเลื่อนไปที่ตำแหน่ง neutral หรือ ตำแหน่ง กลาง แล้ว แขน Servo ต้องตั้งฉากกับตัวของ Servo หาก เอียงไปมากก็ให้ถอดแขน Servo ขยับ แต่ถ้าเอียงนิด หน่อย ขยับไม่ได้แล้วก็ปล่อย ไว้ ค่อยไปปรับต่อที่ขั้นตอนต่อไป ที่เราต้อง set ให้ตั้งฉากเพื่อให้ servo สามรถเคลื่อนที่ไป ทั้งสองด้านได้อย่างเต็มที่ (Maximum throw)
Subtrim
Subtrim
หลังจากใส่แขน Servo ทั้งหมดและติดตั้งกับตัว model แล้วสิ่งแรกที่เราจะตั้งค่าใน วิทยุคือ Subtrim
Sumtrim นั้นเป็น การกำหนดค่าหลัก ( master ) ในการปรับตำแหน่ง กลาง ( neutral ) ของ servo โดยไม่มีผลต่อการเคลื่อนที่ ทั้ง 2 ด้าน พูดง่ายๆ คือ เลื่อนจุดกลางโดยที่ Maximum throw ยังเหมือนเดิมทั้ง 2 ด้าน ใช้สำหรับการปรับละเอียด( fine tune ) แขน Servo ให้อยู่ในตำแหน่งเริ่มต้นที่ถูกต้อง (โดยทั่วไปคือ 90 องศาตั้งฉากกับ ตัว case)
ภาพจาก http://rc.runryder.com/helicopter/t708525p1/
ATV (Adjustable Travel Volume)
หรือที่เราเรียกอีกอย่างหนึ่งว่า EPA (End Point Adjustment) เป็นฟังก์ชันควบคุมหลัก อีกอันหนึ่ง ใช้สำหรับการ จำกัดหรือเพิ่ม การ throw ( ผมขอเรียกทับศัพท์ละกันนะครับ มันหมายถึงว่า การเคลื่อนที่ของแขน servo ไปจนหยุด ด้านใดด้านหนึ่งนะครับในครั้งแรกที่เราตั้งค่ามันอาจ เคลื่อนที่ได้มากสุด หรือ Maximum throw ซึ่งเราอาจไม่ต้องการมันก็ได้ ครับ ขึ้นอยู่กับการติดตั้งและการใช้งาน ) การใช้ EPA นี้ก็เพื่อให้การเคลื่อนที่ของ แขน servo นั้น ได้เต็ม การทำงานของมันโดยไม่ค้ำ ยัน หรือ lock (ATV ควรใช้เมื่อเราตั้ง Dual rate ไว้ที่ค่าสูงสุดนะครับ ดู ด้านล่าง)
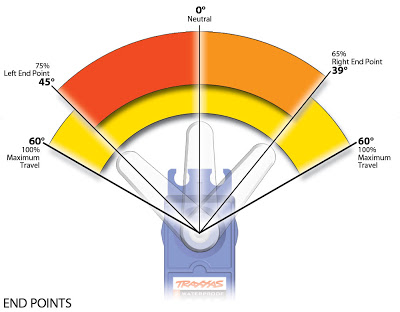
ภาพจาก http://rcdictionary.blogspot.com/2013/08/endpoint-adjustment.html
Trim
วิทยุ นอกจาก มี subtrim แล้วยังมี trim ใช้สำหรับการปรับค่าชดเชยอีกครั้ง หลังจาก Subtrim ถูกตั้งค่า เช่น Aileron ของเครื่องบิน ในครั้งแรกเราอาจต้องมีการ trim ตอน first flight เพื่อแก้อาการเอียงไปทางด้านใดด้านหนึ่ง ให้สามารถปล่อยมือได้ แล้วไม่เอียง เป็นต้น ในการ ตั้ง trim นี้หากดูแล้วมันเยอะเกินไป แปลว่า เรา ติดตั้ง servo ไม่ดี หรือ ปีกเอียงไปด้านใดด้านหนึ่ง จะต้องย้อนกลับไปแก้ อาการนั้นก่อน แล้วมา subtrim แล้ว trim ตอนบินอีกครั้งหนึ่ง นี่เป็นหลักการนะครับ
Dual Rate
การตั้งค่านี้ บ่อยครั้งครับ ใช้ผิดจุดประสงค์การใช้งาน หลายคนใช้ ค่านี้แทน ATV (ดูด้านบน) ซึ่งผิด Dual rate เป็น การกำหนดค่า ที่ต้องทำที่หลัง การตั้งค่า ATV เพื่อจำกัดการเคลื่อนที่ ภายในค่า ของ ATV ถ้าตั้งค่าถูกต้อง Maximum dual rate จะให้การเคลื่อนที่สูงสุดที่จุด ATV ตั้งไว้ และ หากตั้งไว้ 50% ก็จะเป็น ครึ่งหนึ่งของ ATV ที่ตั้งไว้ ค่านี้มี 2 ด้านนะครับ ไม่จำเป็นต้องเท่ากัน

Exp (Exponential)
หรือเรียกว่า Curve เป็นการที่เราจะสามารถกำหนด mid-range ของ throttle หรือ การเลี่ยว การหมุนต่าง ๆ หรือผมจะเรียกว่าการตอบสนอง ละกันครับ ค่ามันก็จะมีทั้งบวก และ ลบ สำหรับการตั้งให้เป็น ลบ (mild หรือ negative) จะทำให้ servo ตอบสนองต่อการขยับของ stick น้อยลง หมายถึงหาก stick ขยับนิดหน่อย( partial control movement) ก็อาจไม่ตอบสนอง และมีผลทำให้ ระยะการเคลื่อนที่ลดลงด้วย เช่นเรา ดัน stick ไปซ้าย 50% servo อาจเคลื่อนที่ไปแค่ 40% เท่านั้น
ส่วนหากเรากำหนดให้เป็น บวก หรือ เป็น fast จะทำให้ servo ตอบสนองเร็ว และเคลื่อนที่มากกว่าเดิม สำหรับค่านี้ควรเป็นค่าน้อย ๆ นะครับหาก เมื่อใดเราต้อง ตั้งค่านี้ มาก จึงจำสามารถควบคุม model ได้ ก็ควรที่จะกลับไปหา function การตั้งค่าหลักก่อน หรือ อาจต้องไปดูที่ตัว model กันเลยที่เดียว
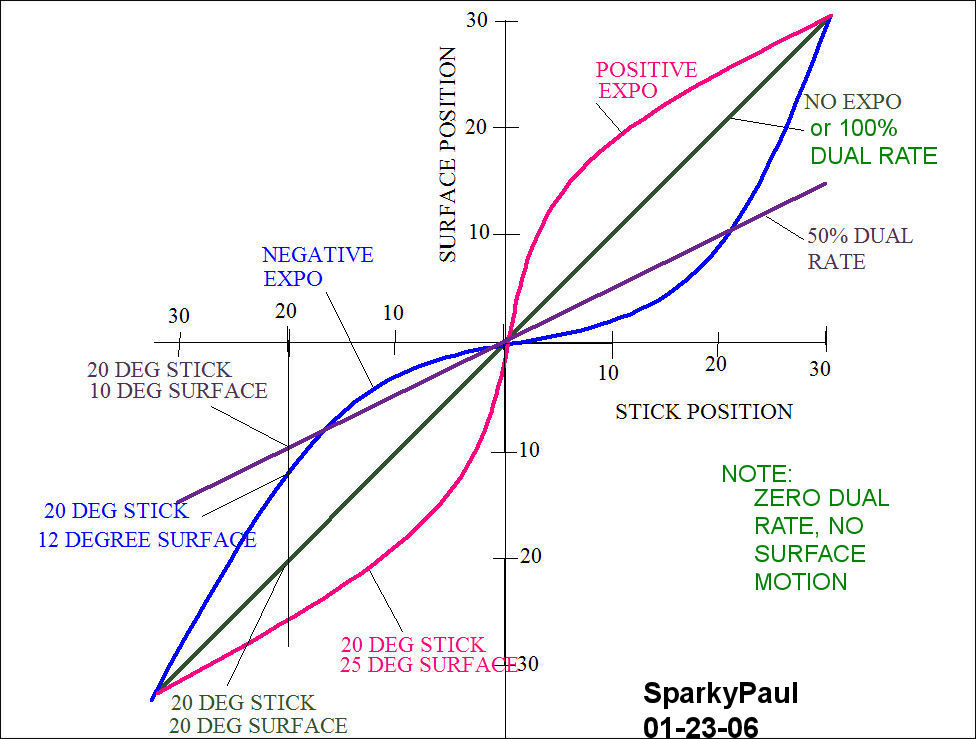
ภาพจาก http://www.angelfire.com/indie/aerostuff/IMAGES/Servo-SurfaceGeometry-02.jpg
ตัวอย่างเช่น หาก เครื่องบิน ตอบสนองต่อการ กัม/เงย เร็ว เกินไป อาจต้องไป กำหนดค่า EXP ของ Elevator ให้เป็น ค่าลบเพื่อให้การตอบสนองช้าลง ซึ่งจะทำให้การควบคุมได้ง่ายขึ้น
สำหรับ dual rate กับ EXP ลองอ่านที่นี่เพิ่มเติมนะครับ
สรุปว่า ขั้นตอน ควรเป็นเช่นนี้นะครับ

ครับคิดว่า ความเข้าใจเหล่านี้จะเป็นประโยชน์ต่อหลายๆ ท่านนะครับ ขอให้สนุกสนานกับการ ควบคุมนะครับ
s_teerapong2000@yahoo.com
s.teerapong@gmail.com
