Archive
ความล้า ของ Servo ก่อเกิดอันตรายต่ออากาศยาน
Servo เป็นหัวใจของระบบควบคุมการบิน ไม่ว่าจะเป็น Elevator, Aileron, Rudder หรือ Throttle หาก servo ตัวใดเริ่มเสื่อมสภาพ ความแม่นยำและความเร็วในการตอบสนองจะลดลงทันที การตรวจพบตั้งแต่ระยะต้นจึงเป็นสิ่งจำเป็นมาก
สัญญาณเตือนว่า Servo เริ่มล้า
1.เสียงผิดปกติ (Unusual Noise) – หากมีเสียงหอนหรือครืดเบา ๆ แม้ไม่มีการขยับโหลด อาจเกิดจากเฟืองเริ่มสึกหรือแกนหมุนหลวม
2.การตอบสนองช้า (Slow Response) – Servo ใช้เวลานานขึ้นกว่าจะขยับถึงตำแหน่งที่สั่ง เทียบกับ servo ตัวใหม่
3.ตำแหน่งไม่คงที่ (Jitter / Hunting) – Servo ขยับเองเล็กน้อยแม้ไม่ได้รับสัญญาณ เปลี่ยนค่า PWM ไปมา ±2–5 µs อย่างไม่เสถียร
4.อุณหภูมิสูงผิดปกติ (Overheating) – ขณะทำงานต่อเนื่อง Servo อุ่นหรือร้อนกว่าปกติ แม้โหลดเท่าเดิม แสดงถึงการสูญเสียประสิทธิภาพของมอเตอร์หรือเกียร์
5.เฟืองมีระยะฟรี (Gear Backlash) – เมื่อขยับปลายคันบังคับด้วยมือแล้วพบว่ามีช่องว่าง (play) มากกว่า 1–2° ให้สงสัยว่าเฟืองเริ่มสึก
6.กระแสไฟสูงกว่าปกติ (High Current Draw) – ใช้เครื่องวัดกระแส (servo tester + power meter) หากกระแสสูงกว่าค่าเฉลี่ย 20–30% แสดงถึงแรงเสียดทานหรือความฝืด
วิธีตรวจสอบหลังจากเปลี่ยนหรือซ่อมทำ
–วัด PWM feedback (ถ้ามี telemetry): ตรวจสอบความต่างระหว่าง “commanded vs actual angle”
–ตรวจสอบ load path: ตรวจดู linkage และ ball link ว่ามีการคลอนหรือรูขยายตัวหรือไม่
–บันทึกชั่วโมงการใช้งาน: ควรกำหนดรอบการเปลี่ยน เช่น ทุก 150–200 ชั่วโมง หรือหลัง flight mission 500 ครั้ง แล้วแต่ภาระงาน

Servo ที่ดู “ยังดี” จากภายนอก อาจเริ่มล้าภายในโดยที่เรามองไม่เห็น การตรวจเช็กเชิงป้องกัน (Preventive Inspection) เป็นแนวทางที่ช่วยป้องกันการสูญเสียทั้งอากาศยานและภารกิจ
“เปลี่ยนก่อนพัง ดีกว่าซ่อมหลังตก”
Which type of drone will suit your application ?? (end)
VTOL คือที่สุดของ 2 โลก (https://coptrz.com/blog/fixed-wing-vs-multirotor-drones-for-surveying/)
เราได้เห็น ความเปลี่ยนแปลง ของความต้องการและการขยายขอบเขตของการการใช้งานอากาศยาน ไร้คนขับในงาน Survey/Mapping และเห็นได้ค่อนข้างชัดว่าผู้ใช้งาน ยังคงเลือกใช้อากาศยานประเภท มัลติโรเตอร์ผู้ ตามข้อดีที่กล่าวไปแล้ว แต่ถึงอย่างไรก็ตามอากาศยานแบบ Fixed-wing ก็ยังมีข้อได้เปรียบที่น่าสนใจเป็นอย่างยิ่งต่อการ เติบโตของงาน และต้นทุนที่แข่งขัน จะดีไปกว่านั้นถ้าเราได้อากาศยาน ที่มีความสามารถในการบินเหมือน Fixed-wing บวกกับความต้องการ ในขนาดพื้นที่ขึ้นลง น้อย มากใกล้เคียงกับอากาศยานแบบ Multi rotor และ บินง่ายขึ้น ไม่ต้องใช้ ทักษะมากนัก ใช้เวลาในการเรียนรู้น้อย ก็จะทำให้อากาศยานนั้น มีความต้องการใช้ไม่น้อย

ย้อนกลับไป 5-6 ปี อากาศยานไร้คนขับแบบ VTOL หรือ Vertical take-off and landing แบบลูกผสม Fxied-wing หรือเราเรียกกันสั้น ๆ ว่า VTOL ค่อย ๆ ปรากฏ ขึ้นมาในช่องว่างที่เรามองหากัน อากาศยานรูปแบบนี้ก็ เริ่มนำเข้ามาใช้งานมากขึ้น จนปรากฏให้เห็นเป็นความนิยมมากขึ้น เพราะคุณสมบัติของ อากาศยานชนิดนี้ เป็นการนำเอา ข้อดีของ อากาศยานแบบ multi rotor บวกกับ อากาศยาน ชนิด Fixed-wing เป็นสิ่งที่ตอบโจทย์ ให้กับผู้ใช้งานหลากหลาย โดยเฉพาะงาน ด้าน Survey/Mapping ขนาดใหญ่ หรือในระยะไกล เช่นการสำรวจดามแนว ทางรถไฟ ตามแนวสายส่ง ตามแนวคลองส่งน้ำ เป็นต้น การฝึกฝนนักบิน ใช้เวลาน้อยกว่าฝึกการใช้งานแบบ Fixed-wing อีกด้วย

ปัจจุบัน เริ่มมีการใช้งานอากาศยานไร้คนขับชนิดนี้กันอย่างกว้างขวาง ขึ้น ทั้งในด้าน Application ในด้านการวิจัยและพัฒนา โรงเรียนและการฝึกสอน ไปจนถึงในด้านสงครามใกล้บ้านไกลบ้าน มีให้เห็นกัน เกลื่อนตา (ในโลกปัจจุบันที่ไม่สามารถปิดกันข้อมูลข่าวสารได้ ) ถ้าไม่จับจ้องเรื่องความเสื่อมถอยทางเศรษฐกิจ ก็ยังคงพอมองเห็นความคึกคักอยู่บ้าง ใครปล่อยผ่านก็อาจจะเสียโอกาสในการแข็งขัน ช่วงนี้ก็ถือว่าเป็นช่วงที่ต้องชิงโอกาส แอบซุ่มทำงานกัน เมื่อเศรษกิจติดเครื่อง จะได้วิ่งไปโลดพร้อมๆ กัน ครับ ก็ขอจบ ไว้เท่านี้ ครับ
Which type of drone will suit your application ?? (2)
มองย้อนกลับไปประมาณ 15-20 ปีที่แล้ว ระบบอากาศยานไร้คนขับ หรือ โดรน ยังไม่มีอากาศยานแบบ Multi rotor เราใช้อากาศยานแบบ Fixed-wing เป็นที่นิยม และใช้กันมาถึงยุคปัจจุบัน มีทั้งแบบ พุ่งขึ้น วิ่งขึ้น และการยิ่งขึ้น มีความสามารถในการบินระยะไกล (long-range) บินนาน (long-endurance) และบินได้สูง (high-altitude) ใช้งานได้หลากหลาย เช่น การบินทำแผนที่สำรวจ (mapping / suvery) การบินเพื่อการ ต่อระยะสัญญาณ (signal relay) หรือการติดตั้ง sensor ชนิดต่าง ๆ เพื่อตรวจวัดสภาพอากาศ

สามารถเปรียบเทียบข้อดีขอเสียกับอากาศยานแบบ multi rotor ได้ดังนี้
อากาศยานแบบ Multi rotor
| ข้อดี | -ฝึกง่าย บินง่าย -สามารถบรรทุกหนักได้ดี (payload capacity) -ใช้ที่ขึ้นลงน้อย – มีความสามารถในการบิน ลอยนิ่งได้ (hover) |
| ข้อเสีย | – บินได้ไม่ไกล(short-range) เพราะเวลาในการบิน (Flight-time) ต่ำ – ต้นทุนในการบำรุงรักษา (Maintenace) สูงกว่า |
อากาศยานแบบ Fixed-wing
| ข้อดี | – บินปฏิบัติการได้ไกล (long-range) เพราะบินได้นานกว่า(long-endurance) – มีเสถียรภาพสูง (Greater stability) สามารถทนต่อลมได้สูง – สามารถร่อนกลับได้ เมื่อแบตเตอรี่หมด (Recover from power loss) – ต้นทุนการบำรุงรักษาต่ำกว่า |
| ข้อเสีย | – การขึ้นและลงต้องการ พื้นที่มาก หรือ runway – นักบินต้องมีการฝึกฝนมากกว่า – ต้องการพื้นที่ ในการเก็บและเคลื่อนย้าย (ใหญ่กว่า Multi rotor) |
ในช่วง 5-6 ปีที่ผ่านมา มีความนิยม เอาอากาศยาน แบบ multi rotor มาบินในงาน Survey/Mapping มากขึ้น เนื่องจากผู้ใช้ ใช้งานง่าย ขนย้านสะดวกกว่า Fixed-wing แต่ในปัจจุบันเมื่อ Application ด้าน survey/mapping มีความต้องการมากขึ้นขนาดพื้นที่ที่ต้องการทำใหญ่ขึ้น ทำให้ข้อได้เปรียบ ของ multi rotor ลดลงไป และมองหาสิ่งที่จะมาทดแทน
Which type of drone will suit your application?? (1)
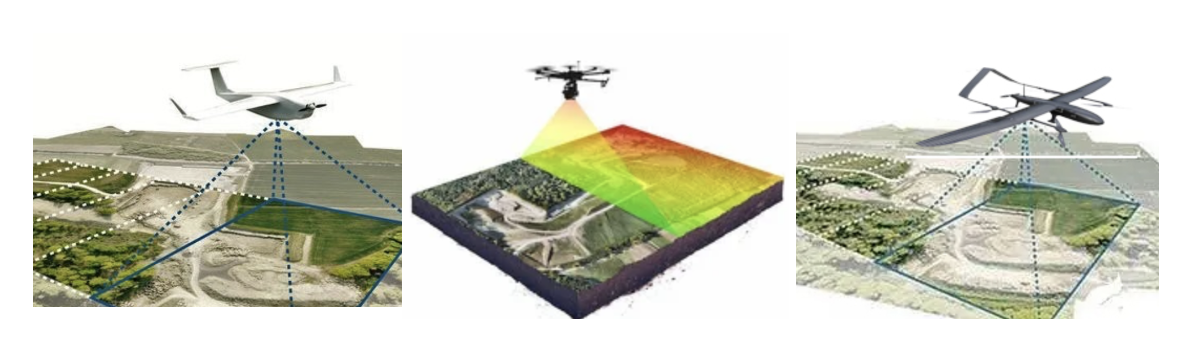
ในปัจจุบัน การใช้งานอากาศยานไร้คนขับ หรือเราเรียกกันว่าโดรน ในงานด้านการสำรวจทำแผนที่ด้วยภาพถ่ายทางอากาศมากขึ้นเป็นลำดับ อากาศยานที่นักบินโดรน นิยมใช้งานกันส่วนมากคือ มัลติโรเตอร์ 4 ใบพัด ตั้งแต่ขนาดเล็ก น้ำหนักไม่กี่กรัม ไปจนถึง น้ำหนักหลายกิโลกรัม (70%ของตลาด)

แต่งานด้านการสำรวจ ทำแผนที่ เริ่มมีการนำข้อมูลไปใช้กันมากขึ้น มีเนื้อที่ ที่ต้องบินครอบครุมมากขึ้น และการเข้าถึงยิ่งลำบากมากขึ้น การบินของอากาศยานแบบมัลติโรเตอร์ เริ่มประสบกับข้อจำกัด ซึ่งเป็นคุณสมบัติประจำตัวของอากาศยานประเภทนี้ คือ บินในอากาศได้ ไม่นานนัก(flight time<40 นาที) ไม่ไกลนัก (range <5km) ไม่สูงนัก(flight attitude <600m) ทำให้การบินในงานสำรวจเริ่มมีอุปสรรค ต้องใช้ทีมบินเยอะขึ้น และต้นทุนที่สูงขึ้น(รวมถึงต้นทุนในการ Maintenace ด้วย) ในขณะเดียวกันก็มีการแข็งขันด้านราคา ที่มากขึ้นตามลำดับ ผู้คนเริ่มมองหาทางเลือกใหม่ที่ทำให้สามารถแก้ปัญหาตรงนี้ได้ (โดรนแบบมัลติโรเตอร์ ไม่เหมาะกับงานบินสำรวจขนาดใหญ่)

