Archive
ภาคสนามกับ Multimeter: ตรวจสุขภาพ Servo ด้วยเครื่องมือ

หลายคนมองว่า “การตรวจสุขภาพ Servo” ต้องใช้เครื่องมือแพง แต่จริง ๆ แล้ว Multimeter ธรรมดาราคาไม่เกิน 300 บาท ก็เพียงพอที่จะช่วยคุณรู้ว่า Servo ยังแข็งแรงหรือกำลังล้า
ก่อนขึ้นบิน ให้ตั้ง Multimeter วัดโหมด DC Voltage แล้วต่อปลายวัดขนานกับสายไฟ Servo (5V และ GND) จากนั้นขยับ servo เต็มช่วงซ้าย–ขวา ถ้าแรงดันตกเกิน 0.3–0.5V ระหว่างหมุน แสดงว่า Power Rail หรือ BEC ของคุณเริ่มอ่อนแรง หรือ servo ตัวนั้นกินไฟเกินปกติ
ต่อมา ตั้งโหมด Current (กระแส) แล้วต่ออนุกรมเข้ากับสายไฟ servo เพื่อดูค่ากระแสที่ใช้ขณะ servo ทำงานปกติ
–หากกระแสสูงกว่า 1.5–2A ต่อเนื่อง แสดงว่ามีแรงเสียดทานหรือ gear ฝืด
–ถ้ามีกระแส spike สูงช่วงต้นแล้วลดลง แสดงว่า servo ยังปกติ
–แต่ถ้า spike นานเกิน 2 วินาที แสดงว่าเริ่มล้า
เทคนิคเล็ก ๆ นี้อาจใช้เวลาไม่ถึง 2 นาที แต่ช่วยป้องกันการสูญเสียทั้งเครื่องและภารกิจได้จริง
..
..
“เครื่องมือไม่ได้ทำให้ดูเป็นมืออาชีพ แต่การใช้มันอย่างเข้าใจต่างหาก” — Leading Edge Unmanned Systems
..
ต่อเนื่องจาก >> ความล้า ของ Servo ก่อเกิดอันตรายต่ออากาศยาน
ความล้า ของ Servo ก่อเกิดอันตรายต่ออากาศยาน
Servo เป็นหัวใจของระบบควบคุมการบิน ไม่ว่าจะเป็น Elevator, Aileron, Rudder หรือ Throttle หาก servo ตัวใดเริ่มเสื่อมสภาพ ความแม่นยำและความเร็วในการตอบสนองจะลดลงทันที การตรวจพบตั้งแต่ระยะต้นจึงเป็นสิ่งจำเป็นมาก
สัญญาณเตือนว่า Servo เริ่มล้า
1.เสียงผิดปกติ (Unusual Noise) – หากมีเสียงหอนหรือครืดเบา ๆ แม้ไม่มีการขยับโหลด อาจเกิดจากเฟืองเริ่มสึกหรือแกนหมุนหลวม
2.การตอบสนองช้า (Slow Response) – Servo ใช้เวลานานขึ้นกว่าจะขยับถึงตำแหน่งที่สั่ง เทียบกับ servo ตัวใหม่
3.ตำแหน่งไม่คงที่ (Jitter / Hunting) – Servo ขยับเองเล็กน้อยแม้ไม่ได้รับสัญญาณ เปลี่ยนค่า PWM ไปมา ±2–5 µs อย่างไม่เสถียร
4.อุณหภูมิสูงผิดปกติ (Overheating) – ขณะทำงานต่อเนื่อง Servo อุ่นหรือร้อนกว่าปกติ แม้โหลดเท่าเดิม แสดงถึงการสูญเสียประสิทธิภาพของมอเตอร์หรือเกียร์
5.เฟืองมีระยะฟรี (Gear Backlash) – เมื่อขยับปลายคันบังคับด้วยมือแล้วพบว่ามีช่องว่าง (play) มากกว่า 1–2° ให้สงสัยว่าเฟืองเริ่มสึก
6.กระแสไฟสูงกว่าปกติ (High Current Draw) – ใช้เครื่องวัดกระแส (servo tester + power meter) หากกระแสสูงกว่าค่าเฉลี่ย 20–30% แสดงถึงแรงเสียดทานหรือความฝืด
วิธีตรวจสอบหลังจากเปลี่ยนหรือซ่อมทำ
–วัด PWM feedback (ถ้ามี telemetry): ตรวจสอบความต่างระหว่าง “commanded vs actual angle”
–ตรวจสอบ load path: ตรวจดู linkage และ ball link ว่ามีการคลอนหรือรูขยายตัวหรือไม่
–บันทึกชั่วโมงการใช้งาน: ควรกำหนดรอบการเปลี่ยน เช่น ทุก 150–200 ชั่วโมง หรือหลัง flight mission 500 ครั้ง แล้วแต่ภาระงาน

Servo ที่ดู “ยังดี” จากภายนอก อาจเริ่มล้าภายในโดยที่เรามองไม่เห็น การตรวจเช็กเชิงป้องกัน (Preventive Inspection) เป็นแนวทางที่ช่วยป้องกันการสูญเสียทั้งอากาศยานและภารกิจ
“เปลี่ยนก่อนพัง ดีกว่าซ่อมหลังตก”
พัฒนาคนเพื่อพัฒนาระบบอากาศยานไร้นักบิน

ในยุคที่เทคโนโลยีอากาศยานไร้นักบิน (UAV) เข้ามามีบทบาทสำคัญในภารกิจด้านความมั่นคง การลาดตระเวน การกู้ภัย และงานภาคสนามต่าง ๆ “บุคลากร” คือหัวใจสำคัญที่จะทำให้ระบบเหล่านี้ทำงานได้อย่างมีประสิทธิภาพ การอบรมและถ่ายทอดองค์ความรู้จากผู้เชี่ยวชาญสู่ผู้ใช้งาน คือขั้นตอนสำคัญของการพัฒนาให้ยั่งยืน ในภาพคือบรรยากาศการฝึกอบรมที่เต็มไปด้วยความตั้งใจ การแลกเปลี่ยน และการซักถามเชิงเทคนิค เพื่อสร้างความเข้าใจร่วมกันระหว่างทีมพัฒนาและผู้ปฏิบัติการจริงในสนาม
การพัฒนา “คน” ไม่ได้จบที่การสอนให้ใช้เครื่อง เราควรปลูกฝังความเข้าใจในระบบ การคิดเชิงวิเคราะห์ และการปฏิบัติอย่างปลอดภัย เมื่อความรู้ถูกถ่ายทอดอย่างถูกทิศถูกทาง ระบบก็จะถูกใช้อย่างเต็มประสิทธิภาพ และนี่คือรากฐานของระบบ UAV ที่มั่นคงและยั่งยืนของประเทศไทย
“การพัฒนาคน… คือหัวใจของพัฒนาเทคโนโลยี”
Which type of drone will suit your application ?? (end)
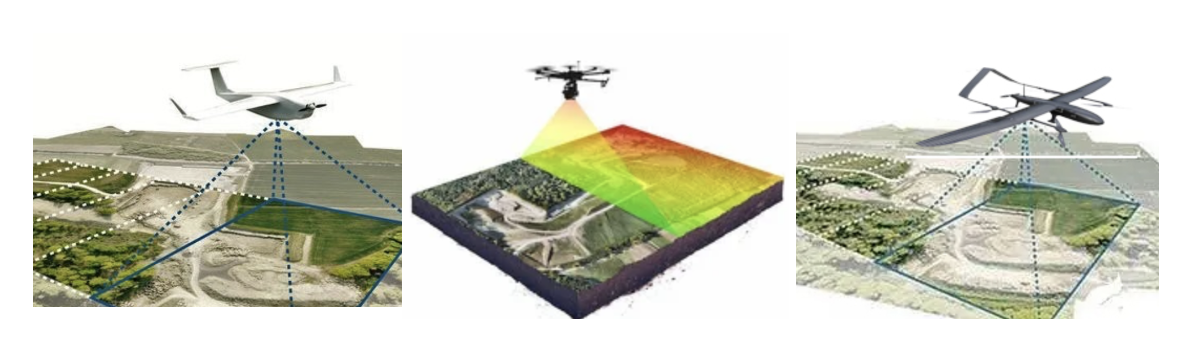
VTOL คือที่สุดของ 2 โลก (https://coptrz.com/blog/fixed-wing-vs-multirotor-drones-for-surveying/)
เราได้เห็น ความเปลี่ยนแปลง ของความต้องการและการขยายขอบเขตของการการใช้งานอากาศยาน ไร้คนขับในงาน Survey/Mapping และเห็นได้ค่อนข้างชัดว่าผู้ใช้งาน ยังคงเลือกใช้อากาศยานประเภท มัลติโรเตอร์ผู้ ตามข้อดีที่กล่าวไปแล้ว แต่ถึงอย่างไรก็ตามอากาศยานแบบ Fixed-wing ก็ยังมีข้อได้เปรียบที่น่าสนใจเป็นอย่างยิ่งต่อการ เติบโตของงาน และต้นทุนที่แข่งขัน จะดีไปกว่านั้นถ้าเราได้อากาศยาน ที่มีความสามารถในการบินเหมือน Fixed-wing บวกกับความต้องการ ในขนาดพื้นที่ขึ้นลง น้อย มากใกล้เคียงกับอากาศยานแบบ Multi rotor และ บินง่ายขึ้น ไม่ต้องใช้ ทักษะมากนัก ใช้เวลาในการเรียนรู้น้อย ก็จะทำให้อากาศยานนั้น มีความต้องการใช้ไม่น้อย

ย้อนกลับไป 5-6 ปี อากาศยานไร้คนขับแบบ VTOL หรือ Vertical take-off and landing แบบลูกผสม Fxied-wing หรือเราเรียกกันสั้น ๆ ว่า VTOL ค่อย ๆ ปรากฏ ขึ้นมาในช่องว่างที่เรามองหากัน อากาศยานรูปแบบนี้ก็ เริ่มนำเข้ามาใช้งานมากขึ้น จนปรากฏให้เห็นเป็นความนิยมมากขึ้น เพราะคุณสมบัติของ อากาศยานชนิดนี้ เป็นการนำเอา ข้อดีของ อากาศยานแบบ multi rotor บวกกับ อากาศยาน ชนิด Fixed-wing เป็นสิ่งที่ตอบโจทย์ ให้กับผู้ใช้งานหลากหลาย โดยเฉพาะงาน ด้าน Survey/Mapping ขนาดใหญ่ หรือในระยะไกล เช่นการสำรวจดามแนว ทางรถไฟ ตามแนวสายส่ง ตามแนวคลองส่งน้ำ เป็นต้น การฝึกฝนนักบิน ใช้เวลาน้อยกว่าฝึกการใช้งานแบบ Fixed-wing อีกด้วย

ปัจจุบัน เริ่มมีการใช้งานอากาศยานไร้คนขับชนิดนี้กันอย่างกว้างขวาง ขึ้น ทั้งในด้าน Application ในด้านการวิจัยและพัฒนา โรงเรียนและการฝึกสอน ไปจนถึงในด้านสงครามใกล้บ้านไกลบ้าน มีให้เห็นกัน เกลื่อนตา (ในโลกปัจจุบันที่ไม่สามารถปิดกันข้อมูลข่าวสารได้ ) ถ้าไม่จับจ้องเรื่องความเสื่อมถอยทางเศรษฐกิจ ก็ยังคงพอมองเห็นความคึกคักอยู่บ้าง ใครปล่อยผ่านก็อาจจะเสียโอกาสในการแข็งขัน ช่วงนี้ก็ถือว่าเป็นช่วงที่ต้องชิงโอกาส แอบซุ่มทำงานกัน เมื่อเศรษกิจติดเครื่อง จะได้วิ่งไปโลดพร้อมๆ กัน ครับ ก็ขอจบ ไว้เท่านี้ ครับ
Which type of drone will suit your application ?? (2)
มองย้อนกลับไปประมาณ 15-20 ปีที่แล้ว ระบบอากาศยานไร้คนขับ หรือ โดรน ยังไม่มีอากาศยานแบบ Multi rotor เราใช้อากาศยานแบบ Fixed-wing เป็นที่นิยม และใช้กันมาถึงยุคปัจจุบัน มีทั้งแบบ พุ่งขึ้น วิ่งขึ้น และการยิ่งขึ้น มีความสามารถในการบินระยะไกล (long-range) บินนาน (long-endurance) และบินได้สูง (high-altitude) ใช้งานได้หลากหลาย เช่น การบินทำแผนที่สำรวจ (mapping / suvery) การบินเพื่อการ ต่อระยะสัญญาณ (signal relay) หรือการติดตั้ง sensor ชนิดต่าง ๆ เพื่อตรวจวัดสภาพอากาศ

สามารถเปรียบเทียบข้อดีขอเสียกับอากาศยานแบบ multi rotor ได้ดังนี้
อากาศยานแบบ Multi rotor
| ข้อดี | -ฝึกง่าย บินง่าย -สามารถบรรทุกหนักได้ดี (payload capacity) -ใช้ที่ขึ้นลงน้อย – มีความสามารถในการบิน ลอยนิ่งได้ (hover) |
| ข้อเสีย | – บินได้ไม่ไกล(short-range) เพราะเวลาในการบิน (Flight-time) ต่ำ – ต้นทุนในการบำรุงรักษา (Maintenace) สูงกว่า |
อากาศยานแบบ Fixed-wing
| ข้อดี | – บินปฏิบัติการได้ไกล (long-range) เพราะบินได้นานกว่า(long-endurance) – มีเสถียรภาพสูง (Greater stability) สามารถทนต่อลมได้สูง – สามารถร่อนกลับได้ เมื่อแบตเตอรี่หมด (Recover from power loss) – ต้นทุนการบำรุงรักษาต่ำกว่า |
| ข้อเสีย | – การขึ้นและลงต้องการ พื้นที่มาก หรือ runway – นักบินต้องมีการฝึกฝนมากกว่า – ต้องการพื้นที่ ในการเก็บและเคลื่อนย้าย (ใหญ่กว่า Multi rotor) |
ในช่วง 5-6 ปีที่ผ่านมา มีความนิยม เอาอากาศยาน แบบ multi rotor มาบินในงาน Survey/Mapping มากขึ้น เนื่องจากผู้ใช้ ใช้งานง่าย ขนย้านสะดวกกว่า Fixed-wing แต่ในปัจจุบันเมื่อ Application ด้าน survey/mapping มีความต้องการมากขึ้นขนาดพื้นที่ที่ต้องการทำใหญ่ขึ้น ทำให้ข้อได้เปรียบ ของ multi rotor ลดลงไป และมองหาสิ่งที่จะมาทดแทน