ความล้า ของ Servo ก่อเกิดอันตรายต่ออากาศยาน
Servo เป็นหัวใจของระบบควบคุมการบิน ไม่ว่าจะเป็น Elevator, Aileron, Rudder หรือ Throttle หาก servo ตัวใดเริ่มเสื่อมสภาพ ความแม่นยำและความเร็วในการตอบสนองจะลดลงทันที การตรวจพบตั้งแต่ระยะต้นจึงเป็นสิ่งจำเป็นมาก
สัญญาณเตือนว่า Servo เริ่มล้า
1.เสียงผิดปกติ (Unusual Noise) – หากมีเสียงหอนหรือครืดเบา ๆ แม้ไม่มีการขยับโหลด อาจเกิดจากเฟืองเริ่มสึกหรือแกนหมุนหลวม
2.การตอบสนองช้า (Slow Response) – Servo ใช้เวลานานขึ้นกว่าจะขยับถึงตำแหน่งที่สั่ง เทียบกับ servo ตัวใหม่
3.ตำแหน่งไม่คงที่ (Jitter / Hunting) – Servo ขยับเองเล็กน้อยแม้ไม่ได้รับสัญญาณ เปลี่ยนค่า PWM ไปมา ±2–5 µs อย่างไม่เสถียร
4.อุณหภูมิสูงผิดปกติ (Overheating) – ขณะทำงานต่อเนื่อง Servo อุ่นหรือร้อนกว่าปกติ แม้โหลดเท่าเดิม แสดงถึงการสูญเสียประสิทธิภาพของมอเตอร์หรือเกียร์
5.เฟืองมีระยะฟรี (Gear Backlash) – เมื่อขยับปลายคันบังคับด้วยมือแล้วพบว่ามีช่องว่าง (play) มากกว่า 1–2° ให้สงสัยว่าเฟืองเริ่มสึก
6.กระแสไฟสูงกว่าปกติ (High Current Draw) – ใช้เครื่องวัดกระแส (servo tester + power meter) หากกระแสสูงกว่าค่าเฉลี่ย 20–30% แสดงถึงแรงเสียดทานหรือความฝืด
วิธีตรวจสอบหลังจากเปลี่ยนหรือซ่อมทำ
–วัด PWM feedback (ถ้ามี telemetry): ตรวจสอบความต่างระหว่าง “commanded vs actual angle”
–ตรวจสอบ load path: ตรวจดู linkage และ ball link ว่ามีการคลอนหรือรูขยายตัวหรือไม่
–บันทึกชั่วโมงการใช้งาน: ควรกำหนดรอบการเปลี่ยน เช่น ทุก 150–200 ชั่วโมง หรือหลัง flight mission 500 ครั้ง แล้วแต่ภาระงาน

Servo ที่ดู “ยังดี” จากภายนอก อาจเริ่มล้าภายในโดยที่เรามองไม่เห็น การตรวจเช็กเชิงป้องกัน (Preventive Inspection) เป็นแนวทางที่ช่วยป้องกันการสูญเสียทั้งอากาศยานและภารกิจ
“เปลี่ยนก่อนพัง ดีกว่าซ่อมหลังตก”
พัฒนาคนเพื่อพัฒนาระบบอากาศยานไร้นักบิน

ในยุคที่เทคโนโลยีอากาศยานไร้นักบิน (UAV) เข้ามามีบทบาทสำคัญในภารกิจด้านความมั่นคง การลาดตระเวน การกู้ภัย และงานภาคสนามต่าง ๆ “บุคลากร” คือหัวใจสำคัญที่จะทำให้ระบบเหล่านี้ทำงานได้อย่างมีประสิทธิภาพ การอบรมและถ่ายทอดองค์ความรู้จากผู้เชี่ยวชาญสู่ผู้ใช้งาน คือขั้นตอนสำคัญของการพัฒนาให้ยั่งยืน ในภาพคือบรรยากาศการฝึกอบรมที่เต็มไปด้วยความตั้งใจ การแลกเปลี่ยน และการซักถามเชิงเทคนิค เพื่อสร้างความเข้าใจร่วมกันระหว่างทีมพัฒนาและผู้ปฏิบัติการจริงในสนาม
การพัฒนา “คน” ไม่ได้จบที่การสอนให้ใช้เครื่อง เราควรปลูกฝังความเข้าใจในระบบ การคิดเชิงวิเคราะห์ และการปฏิบัติอย่างปลอดภัย เมื่อความรู้ถูกถ่ายทอดอย่างถูกทิศถูกทาง ระบบก็จะถูกใช้อย่างเต็มประสิทธิภาพ และนี่คือรากฐานของระบบ UAV ที่มั่นคงและยั่งยืนของประเทศไทย
“การพัฒนาคน… คือหัวใจของพัฒนาเทคโนโลยี”
การบำรุงรักษาโดรนของเรา (Drone maintenance)
โดรน หรือ อากาศยานไร้นักบิน ในบ้านเราสร้างประโยชน์ให้กับภาคเกษตรและอุตสาหกรรมมากมาย ระยะหนึ่งของการใช้งานก้าวมาสู่ช่วงของการต้องซ่อมบำรุงระบบอากาศยานฯ เรามาเรียนรู้การซ่อมบำรุงอากาศยานกันครับ


งานซ่อมบำรุงเป็นวิธีการที่จะทำให้อากาศยานฯของเราสามารถทำงานได้ต่อเนื่อง ไม่ต้องเสียเวลากับปัญหาที่เกิดขึ้นระหว่างการปฏิบัติงาน ประโยชน์ของงานซ่อมบำรุงมีดังนี้
- คงประสิทธิภาพของโดรน การบำรุงรักษาทำให้เราตรวจพบสิ่งที่จะเกิดปัญหากับระบบอากาศยานของ เช่นรอยแตกบนใบพัด ตำหนิต่างๆ ที่ปรากฏกับมอเตอร์ สายไฟสายสัญญาณ ที่เริ่มเสื่อมสภาพ เป็นต้น การตรวจและแก้ไข หรือเปลี่ยน เป็นประจำจะเป็นการป้องกัน หรือลดความเสี่ยงที่จะเกิดข้อขัดข้องในขณะบินอยู่บนอากาศ ได้เป็นอย่างดี
- เพิ่มความปลอดภัย (Safety) การบำรุงรักษาอย่างสม่ำเสมอ เป็นการคงความพร้อมในการบินอยู่เสมอ (Airworthiness) ความเสี่ยงที่จะเกิดความเสียหายก็น้อยลง หรือใกล้เคียงคำว่าศูนย์ ปัญหาที่เกิดในระหว่างบิน ทำให้สูญเสียเวลาและเงิน หรือมากกว่านั้น ถึงกับเสียอุปกรณ์ที่มีราคาสูง เป็นค่าใช้จ่ายที่ไม่ควรเกิดขึ้น
- ยืดอายุการใช้งาน (Extended Life Span) การบำรุงรักษาอยู่เสมอ อุบัติเหตุ อุบัติการ ที่จะเกิดขึ้นกับระบบอากาศยานฯ จะมีน้อยถึงน้อยที่สุด อากาศยานฯ ก็จะอยู่กับเรานานขึ้น ตราบเท่าที่เราไม่ละเลย
- ลดต้นทุน (Cost saving) เป็นบทสรุปของสิ่งที่กล่าวมา การที่มีระบบอากาศยานฯ ที่มีความสมบูรณ์ ลดความเสี่ยง ในเรื่องการสูญเสีย อุบัติเหต อุบัติการต่างๆ ไม่จำเป็นมาเสียเงินเสียเวลาในการแก้ปัญหา หน้างาน หรืออาจเสียงาน ได้เลย
รายการตรวจสอบการบำรุงรักษาโดรนตามปกติ (Drone Maintenance Checklist)
แนวทางในการบำรุงรักษาโดรนของเรา ควรจะมีเครื่องไม้เครื่องพร้อมก่อน ตามรายการ ด้านล่าง
- ผ้าไมโครไฟเบอร์ และอุปกรณ์ทำความสะอาด น้ำยาขจัดกาวหรือสิ่งสกปก และ contact cleaner
- อุปกรณ์เป่าลมแรงสูง และชุดแปลงปัดผุ่น
- ไขควงเพื่อย้ำ สกรูให้แน่น
- รายการ Firmware ที่จำเป็นของอากาศยานฯ
- จัดเตรียมคู่มือของ อากาศยานฯ นั้น ๆ

การตรวจสอบด้วยตา (Visual Inspection)
การบำรุงรักษาส่วนใหญ่เริ่มด้วยการทำ Visual check หรือการตรวจสอบด้วยสายตาที่ส่วนต่างๆ ของอากาศยานฯ เพื่อตรวจสอบข้อบกพร่องหรือความเสียหาย ที่จะนำไปสู่ อันตรายในขณะบินได้ ความพกพร่องต่าง ๆ เช่น จุดแตก น็อตหลวม หรืออุปกรณ์ มีจุดยึดหลวม หรือชิ้นส่วนมีความเสียหาย การตรวจสอบพบก่อน แต่เนิ่นๆ จะเป็นการป้องกันข้อผิดพลาดในขณะบินได้เป็นอย่างดี รายการด้านล่างเป็นตัวอย่างของ Visual Inspection
- การตรวจสอบโครงสร้างลำตัวเพื่อหาจุดแตก (Cracks) ตรวจสอบโครงสร้างลำตัวโดรน ควรทำในที่ที่มี แสงสว่างมองเห็นได้ชัด ตรวจสอบ แขน ตัวลำ และข้อต่อต่างๆ เพื่อหาจุดที่เป็นลอยแตกหรือ จุดออ่นบนโครงสร้าง
- ตรวจสอบ น็อตที่หลวม ต้องมันว่าส่วนประกอบต่าง ๆ ยึดแน่นอยู่ในตำแหน่งของตัวเอง ตรวจสอบน็อตทุกตัวที่มองเห็นและขันตึง ไม่ควรขันตึงจนแน่นเกินที่เกียวของน็อตจะรับกำลังได้ ให้ตรวจสอบกับคู่มือให้มั่นใจ
- ตรวจสอบใบพัดเพื่อหาจุดเสียหาย (damage) ใบพัดของโดรน เป็นของเปราะบางควรตรวจสอบให้ละเอียด หาจุดแตก หรือใช้มือลูบคลำให้ทั่วใบ หากมีรอยแตกควรเปลี่ยน ทดแทนจะดีที่สุด
- ตรวจสอบเมอเตอร์ ดูว่ามีขณะหมุนมีเสียงผิดปกติ หรือหมุนผืด อาจมือเศษผงหรือเศษอิฐ ติดอยู่ภายในมอเตอร์ ให้ทำการเป่าออก หรือใช้แปลงปัดออกให้สะอาด
- ตรวจสอบสายสัญญาณ และสายไฟ หากโดรนของเรามี สายสัญญาณหรือสายไฟภายนอกตัวลำ ให้ตำรวจสอบให้ละเอียด เนื่องจากมีความเสี่ยงที่เสียหาย หากมีอาการหรือสามารถเห็นด้วยตาว่าเสียให้ส่งซ่อม
- ตรวจสอบ Landing Gear , ตรวจสอบ เสาอากาศ หาจุดแตกจุดพกพร่องต่าง ๆ
- ตรวจสอบชุดควบคุม ดูจุดต่างๆ ที่อาจเป็นข้อพกพร่อง หน้าจอการแสดงผล สวิท และ ผ่าปิดต่างๆ
ตรวจสอบ Battery
แบตเตอรี่ของโดรนเป็นส่วนประกอบที่มีความสำคัญเป็นอย่างยิ่ง เพราะเป็นตัวให้กำลังไฟกับระบบ หากปล่อยให้มีข้อพกพร่องอาจทำให้นำไปสู่ Power loss ระหว่างทำการบินได้ และทำให้ล่วงหล่นได้ การหมั่นตรวจสอบเสมอๆ จะทำให้สามารถพบเจออาการบวม (Swelling) การแตก (Leakage) หรือสิ่งอื่นๆ ที่เป็นอาการบ่งชี้ถึงความเสียหาย เสื่อมสภาพของแบตเตอรี่ ต่อไปเป็นการตรวจสอบเพื่อให้สามารถรักษาสภาพของแบตเตอรี่ให้อยู่ในสภาพที่ดี
- ตรวจสอบแทนชาร์จ (Charger) หาจุดเสียหาย สายไฟต่างที่อยู่ภายนอก และอาการ Overheating
- ตรวจสอบ packs ของแบตเตอร์ (Batter packs) หาจุดบวมจุดแตก อาการต่างๆ ที่บ่งบอกถึงความเสื่อสภาพ ควรเปลี่ยนทดแทนเลย
- ทดสอบ ชาร์จแบตเตอรี่ ชาร์จให้เต็มเมื่อต้องการออกไปใช้งานเลยใน 1-2 วันหากมีแผนที่จะบิน หรือชาร์จให้อยู่ในระดับ 75% ของความจุเพื่อรักษาสภาพใร mode storage
ตามที่ได้พูดมาข้างต้นเป็นขั้นตอนการดูแลรักษาอากาศยายฯ หรือ โดรนของเราให้มีสภาพพร้อมใช้งานเสมอ ลดความเสี่ยงที่จะเกิดอันตรายกับตัวเครื่อง กับทรัพสินของเราและผู้อื่นได้ เป็นอย่างดี ครับ
#Wingsworldwide #Teamhighaltitude
Which type of drone will suit your application ?? (end)
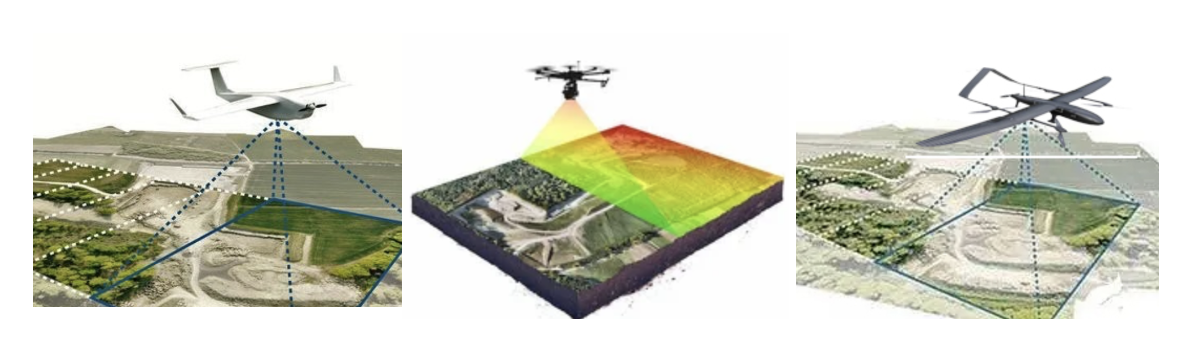
VTOL คือที่สุดของ 2 โลก (https://coptrz.com/blog/fixed-wing-vs-multirotor-drones-for-surveying/)
เราได้เห็น ความเปลี่ยนแปลง ของความต้องการและการขยายขอบเขตของการการใช้งานอากาศยาน ไร้คนขับในงาน Survey/Mapping และเห็นได้ค่อนข้างชัดว่าผู้ใช้งาน ยังคงเลือกใช้อากาศยานประเภท มัลติโรเตอร์ผู้ ตามข้อดีที่กล่าวไปแล้ว แต่ถึงอย่างไรก็ตามอากาศยานแบบ Fixed-wing ก็ยังมีข้อได้เปรียบที่น่าสนใจเป็นอย่างยิ่งต่อการ เติบโตของงาน และต้นทุนที่แข่งขัน จะดีไปกว่านั้นถ้าเราได้อากาศยาน ที่มีความสามารถในการบินเหมือน Fixed-wing บวกกับความต้องการ ในขนาดพื้นที่ขึ้นลง น้อย มากใกล้เคียงกับอากาศยานแบบ Multi rotor และ บินง่ายขึ้น ไม่ต้องใช้ ทักษะมากนัก ใช้เวลาในการเรียนรู้น้อย ก็จะทำให้อากาศยานนั้น มีความต้องการใช้ไม่น้อย

ย้อนกลับไป 5-6 ปี อากาศยานไร้คนขับแบบ VTOL หรือ Vertical take-off and landing แบบลูกผสม Fxied-wing หรือเราเรียกกันสั้น ๆ ว่า VTOL ค่อย ๆ ปรากฏ ขึ้นมาในช่องว่างที่เรามองหากัน อากาศยานรูปแบบนี้ก็ เริ่มนำเข้ามาใช้งานมากขึ้น จนปรากฏให้เห็นเป็นความนิยมมากขึ้น เพราะคุณสมบัติของ อากาศยานชนิดนี้ เป็นการนำเอา ข้อดีของ อากาศยานแบบ multi rotor บวกกับ อากาศยาน ชนิด Fixed-wing เป็นสิ่งที่ตอบโจทย์ ให้กับผู้ใช้งานหลากหลาย โดยเฉพาะงาน ด้าน Survey/Mapping ขนาดใหญ่ หรือในระยะไกล เช่นการสำรวจดามแนว ทางรถไฟ ตามแนวสายส่ง ตามแนวคลองส่งน้ำ เป็นต้น การฝึกฝนนักบิน ใช้เวลาน้อยกว่าฝึกการใช้งานแบบ Fixed-wing อีกด้วย

ปัจจุบัน เริ่มมีการใช้งานอากาศยานไร้คนขับชนิดนี้กันอย่างกว้างขวาง ขึ้น ทั้งในด้าน Application ในด้านการวิจัยและพัฒนา โรงเรียนและการฝึกสอน ไปจนถึงในด้านสงครามใกล้บ้านไกลบ้าน มีให้เห็นกัน เกลื่อนตา (ในโลกปัจจุบันที่ไม่สามารถปิดกันข้อมูลข่าวสารได้ ) ถ้าไม่จับจ้องเรื่องความเสื่อมถอยทางเศรษฐกิจ ก็ยังคงพอมองเห็นความคึกคักอยู่บ้าง ใครปล่อยผ่านก็อาจจะเสียโอกาสในการแข็งขัน ช่วงนี้ก็ถือว่าเป็นช่วงที่ต้องชิงโอกาส แอบซุ่มทำงานกัน เมื่อเศรษกิจติดเครื่อง จะได้วิ่งไปโลดพร้อมๆ กัน ครับ ก็ขอจบ ไว้เท่านี้ ครับ
Which type of drone will suit your application ?? (2)
มองย้อนกลับไปประมาณ 15-20 ปีที่แล้ว ระบบอากาศยานไร้คนขับ หรือ โดรน ยังไม่มีอากาศยานแบบ Multi rotor เราใช้อากาศยานแบบ Fixed-wing เป็นที่นิยม และใช้กันมาถึงยุคปัจจุบัน มีทั้งแบบ พุ่งขึ้น วิ่งขึ้น และการยิ่งขึ้น มีความสามารถในการบินระยะไกล (long-range) บินนาน (long-endurance) และบินได้สูง (high-altitude) ใช้งานได้หลากหลาย เช่น การบินทำแผนที่สำรวจ (mapping / suvery) การบินเพื่อการ ต่อระยะสัญญาณ (signal relay) หรือการติดตั้ง sensor ชนิดต่าง ๆ เพื่อตรวจวัดสภาพอากาศ

สามารถเปรียบเทียบข้อดีขอเสียกับอากาศยานแบบ multi rotor ได้ดังนี้
อากาศยานแบบ Multi rotor
| ข้อดี | -ฝึกง่าย บินง่าย -สามารถบรรทุกหนักได้ดี (payload capacity) -ใช้ที่ขึ้นลงน้อย – มีความสามารถในการบิน ลอยนิ่งได้ (hover) |
| ข้อเสีย | – บินได้ไม่ไกล(short-range) เพราะเวลาในการบิน (Flight-time) ต่ำ – ต้นทุนในการบำรุงรักษา (Maintenace) สูงกว่า |
อากาศยานแบบ Fixed-wing
| ข้อดี | – บินปฏิบัติการได้ไกล (long-range) เพราะบินได้นานกว่า(long-endurance) – มีเสถียรภาพสูง (Greater stability) สามารถทนต่อลมได้สูง – สามารถร่อนกลับได้ เมื่อแบตเตอรี่หมด (Recover from power loss) – ต้นทุนการบำรุงรักษาต่ำกว่า |
| ข้อเสีย | – การขึ้นและลงต้องการ พื้นที่มาก หรือ runway – นักบินต้องมีการฝึกฝนมากกว่า – ต้องการพื้นที่ ในการเก็บและเคลื่อนย้าย (ใหญ่กว่า Multi rotor) |
ในช่วง 5-6 ปีที่ผ่านมา มีความนิยม เอาอากาศยาน แบบ multi rotor มาบินในงาน Survey/Mapping มากขึ้น เนื่องจากผู้ใช้ ใช้งานง่าย ขนย้านสะดวกกว่า Fixed-wing แต่ในปัจจุบันเมื่อ Application ด้าน survey/mapping มีความต้องการมากขึ้นขนาดพื้นที่ที่ต้องการทำใหญ่ขึ้น ทำให้ข้อได้เปรียบ ของ multi rotor ลดลงไป และมองหาสิ่งที่จะมาทดแทน